A healthy adult will walk 200,000,000 steps during their lifetime. Motion is considered our 6th vital sign, and motion biomarkers are reliable indicators of health and wellbeing. But more than one billion individuals suffer from mobility impairments, arising from a neurological or musculoskeletal condition.

At MindMaze Assessments, we leverage our expertise in Motion Analytics to deliver patient-centric Digital Motion Assessment technologies (DMA) at the point of need. We are addressing the challenge of integrating DMA across the continuum-of-care for patients with mobility disorders, thus enabling a new generation of gait biomarkers and digital endpoints to assess human motion at scale.
The versatility of our motion analysis technology makes it suitable to support three distinct fields: academic research, clinical investigations and sports science projects.
Academic Research
Clinical Investigations
Sports Science
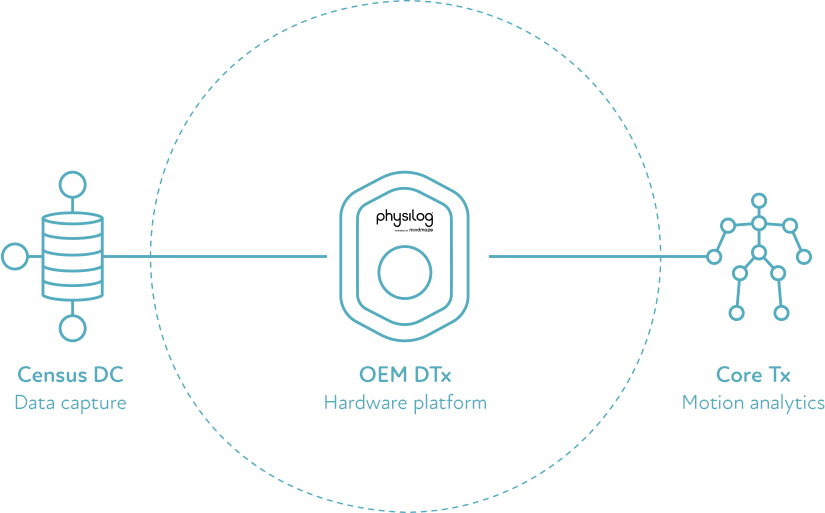
Our proprietary full-stack Physilog® platform delivers powerful 3D motion analytics to capture, measure, and analyse a new-generation of digital biomarkers. It combines sixth-generation wearable motion sensors (aptly named Physilog® 6, or P6) with powerful biomechanical fusion algorithms and a modular suite of protocolised clinical tests.
Since our founding in 2013, our Physilog® platform has earned the trust of a global life science and academic research community in over 30 countries, using our solutions to assess 10'000+ subjects and being referenced in 500+ publications.
Our Digital Motion Assessment solutions may be able to help advance your clinical or commercial objectives. Get in touch now.